Nhiệm vụ của hệ thống kiểm soát hành trình thích ứng?
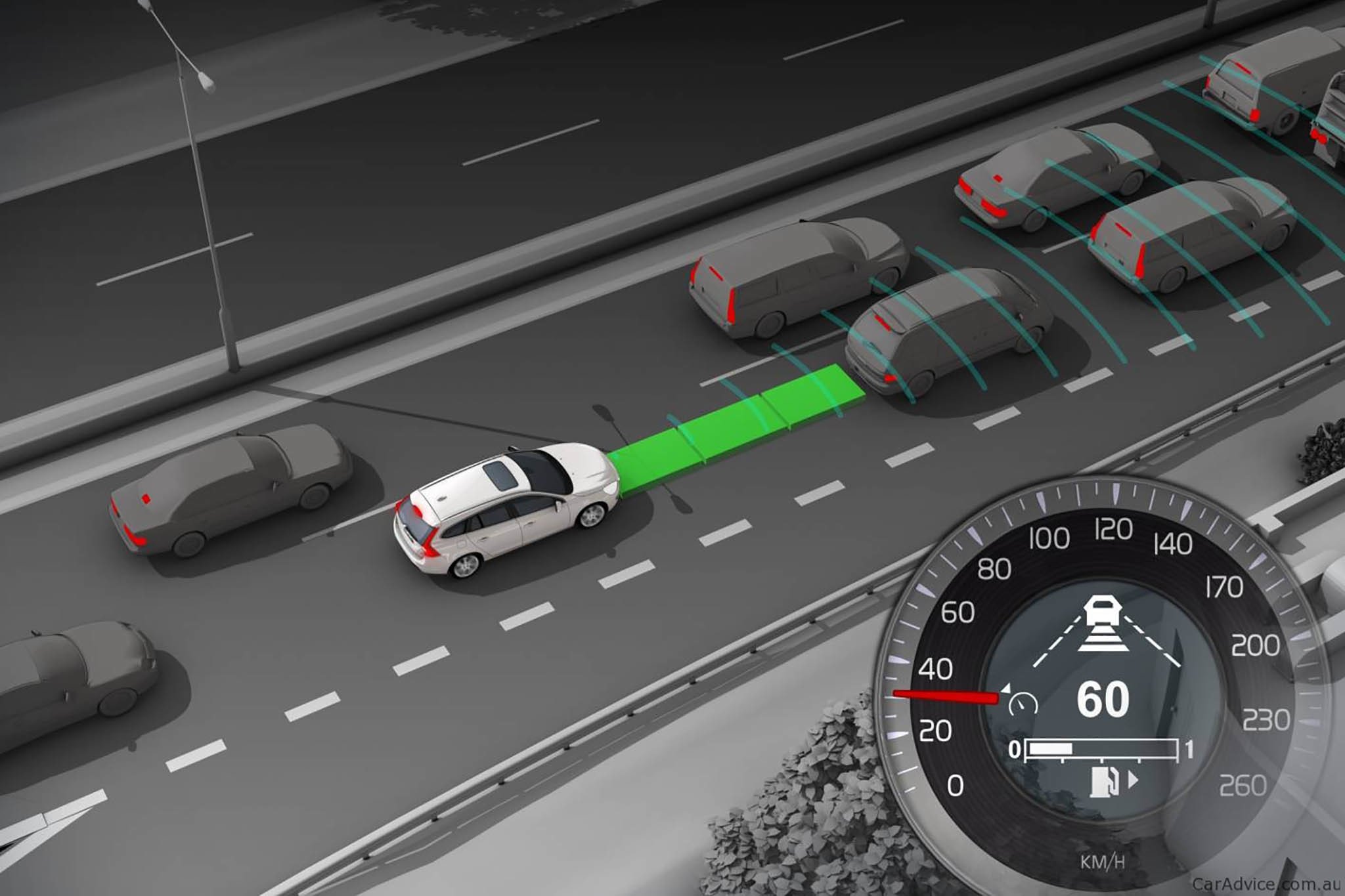
Hệ thống kiểm soát hành trình thích ứng ngoài khả năng duy trì tốc độ xe theo ý muốn của tài xế, nó còn có chức năng cảnh báo va chạm và hỗ trợ giảm tốc trong trường hợp cần thiết, nhằm tăng sự an toàn và tính tiện dụng cho người lái xe.
Công nghệ này sẽ tự động giảm ga và thậm chí là tự động phanh (sử dụng bơm từ hệ thống chống bó cứng phanh ABS) khi phát hiện có vật cản phía trước trong các điều kiện giao thông đông đúc để duy trì được khoảng cách an toàn với các xe phía trước. Và chiếc xe sẽ từ động điều khiển bướm ga để tăng tốc xe đạt đến tốc độ đã đinh sẵn khi rada phát hiện khoảng cách phía trước xe đã an toàn. Do đó, Hệ thống kiểm soát hành trình thích ứng có thể điều chỉnh tốc độ của xe để phù hợp với tốc độ của xe đang di chuyển phía trước và duy trì sự an toàn từ nó. Lái xe có thể duy trì hoặc tắt chức năng này bất cứ lúc nào bằng cách nhấn ga hoặc chân phanh.

Cấu tạo của hệ thống kiểm soát hành trình thích ứng?
Cảm biến khoảng cách
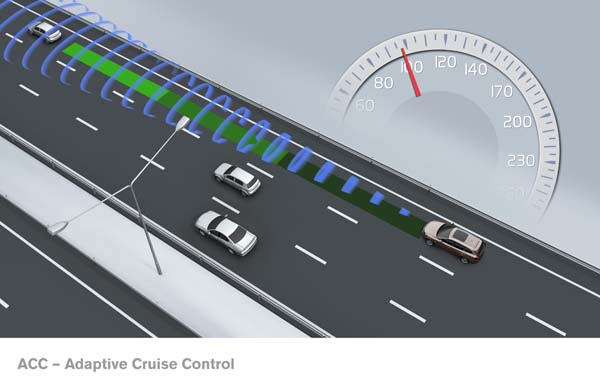
Hệ thống này sử dụng các cảm biến đo khoảng cách từ mũi xe đến vật thể phía trước bằng sóng radar hoạt động trong dải tần số từ 76 đến 77 GHz. Sau khi được kích hoạt, cảm biến này phát hiện các phương tiện khác trong phạm vi lên tới 200m phía trước xe.

Kiến trúc mạng
Chức năng của hệ thống kiểm soát hành trình thích ứng không được thực hiện như một hệ thống độc lập mà phụ thuộc vào nhiều hệ thống con khác nhau (hệ thống điều khiển động cơ, hệ thống cân bằng điện tử, điều khiển chuyển tiếp,…) và phải được liên kết với nhau. Bộ điều khiển của hệ thống này được tích hợp trong cảm biến, nó nhận và gửi dữ liệu trên xe bằng mạng kết nối CAN đến các đơn vị điều khiển điện tử khác.

Hệ thống điều khiển
Cơ bản gồm 3 mô-đun
Mô-đun điều khiển 1: điều khiển hành trình. Nếu cảm biến radar không phát hiện thấy bất kỳ phương tiện nào ở phía trước, hệ thống sẽ duy trì tốc độ mong muốn do người lái đặt ở chế độ ga tự động – Cruise Control.
Mô-đun điều khiển 2: điều khiển theo dõi. Khi cảm biến radar phát hiện có phương tiện phía trước. Modul này sẽ thực hiện nhiệm vụ kiểm soát tốc độ để duy trì khoảng cách thời gian với chiếc xe gần nhất ở một cài đặt không đổi.
Mô-đun điều khiển 3: điều khiển khi vào cua. Khi vào các khúc cua có góc ngoặt lớn, cảm biến radar lúc này sẽ mất “tầm nhìn” so với chiếc xe phía trước. Cho đến khi chiếc xe xuất hiện trở lại radar hoặc cho đến khi hệ thống được chuyển sang kiểm soát hành trình bình thường, các biện pháp đặc biệt có hiệu lực. Tùy thuộc vào nhà sản xuất, tốc độ sau đó sẽ được duy trì, tốc độ gia tốc ngang hiện tại được điều chỉnh hoặc chức năng hệ thống bị vô hiệu hóa.
Thiết lập hệ thống
Để đảm bảo hệ thống kiểm soát hành trình thích ứng hoạt động một cách đáng tin cậy trong bất kỳ tình huống nào.
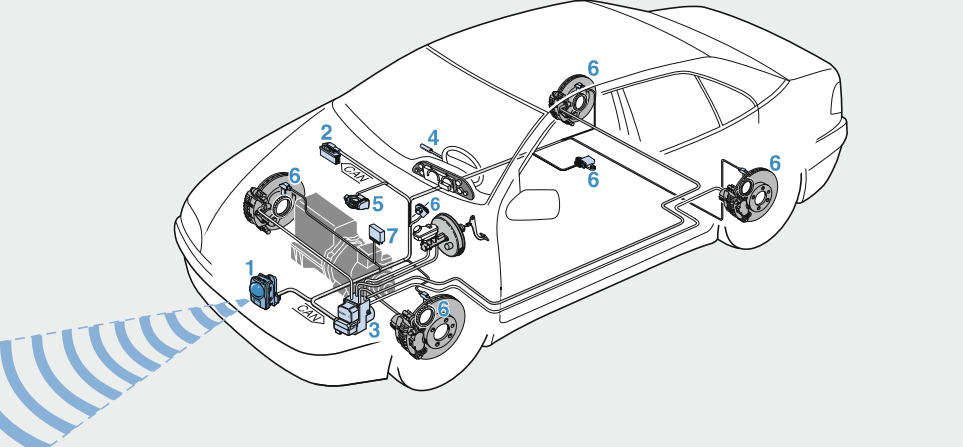
1. Cảm biến khoảng cách và bộ điều khiển
2. Hộp ECU
3. Bộ điều khiển can thiệp phanh thông qua ESP
4. Công tắc điều khiển và màn hình hiển thị
5. Can thiệp điều khiển động cơ bằng van tiết lưu điều chỉnh bằng điện
6. Cảm biến tốc độ bánh xe
7. Điều khiển chuyển số bằng phương tiện điều khiển truyền điện tử
Can thiệp hệ thống điều khiển động cơ
Kiểm soát tốc độ đòi hỏi cần có một hệ thống kiểm soát điện tử. Hệ thống điều khiển động cơ được tích hợp với chức năng này. Hệ thống cho phép chiếc xe có thể tăng tốc đến tốc độ mong muốn hoặc nếu gặp một chướng ngại vật xuất hiện thì chiếc xe được giảm tốc bằng cách đóng mở bướm ga tự động.
Điều khiển hệ thống phanh
Trong trường hợp tốc độ được giảm bằng cách điều khiển bướm ga chưa đủ an toàn, hệ thống phanh sẽ được kích hoạt. Các hệ thống an toàn trên xe như ABS, TCS hoặc ESP hoàn toàn có thể hoạt động bình thường trong quá trình ACC can thiệp kiểm soát xe
Giới hạn của hệ thống
Hệ thống này chỉ có thể được kích hoạt ở tốc độ đạt được tốc độ từ 30 km/h trở lên. ACC chưa thể được kích hoạt trong điều kiện giao thông trong khu vực nội thành ở các thành phố lớn.

Điều kiện kích hoạt hệ thống kiểm soát hành trình thích ứng?
Trình điều khiển cho phép người lái nhập tốc độ và khoảng cách xác định đối với xe phía trước, khoảng cách này thường dao động từ 1 đến 2 giây ứng với vận tốc đang di chuyển tùy thuộc vào cài đặt của người lái xe, thông tin này được tính từ các tín hiệu radar. Nếu giá trị này ngắn hơn giá trị mong muốn, hệ thống sẽ phản ứng theo cách phù hợp với tình huống giao thông bằng cách giảm mô-men xoắn động cơ và tự động kích hoạt phanh xe khi cần thiết. Nếu vượt quá khoảng cách mong muốn hoặc đường trống trải, xe sẽ tăng tốc cho đến khi đạt được tốc độ của xe phía trước hoặc tốc độ mong muốn do người lái cài đặt.
Với những ưu điểm như vậy nên ACC giúp ích rất nhiều cho lái xe ở những cung đường nội đô đông đúc khi phải liên tục thay đổi chế độ giữa dừng và chạy. Bên cạnh đó, nó còn đặc biệt hữu ích ở những cung đường cao tốc, quốc lộ đem lại khả năng an toàn cao hơn cho lái xe. Trên thị trường, ACC cơ bản được chia làm hai lại chính là “full range ACC” – hoạt động trên toàn dải tốc độ từ 0 đến trên 100 km/h với giá trên $2000 và “partial ACC” – chỉ hoạt động ở tốc độ khoảng từ 35 – 40km/h với giá rẻ hơn tầm $500 đến $1000.
Cách thức kích hoạt chế độ ACC
Quá trình sử dụng hệ thống kiểm soát hành trình thích ứng ACC cũng tương tự như những hệ thống kiểm soát hành trình truyền thống. Lái xe chỉ cần đưa xe đạt đến tốc độ mong muốn và chọn nút “set” trên vô lăng để kích hoạt hệ thống. Bên cạnh đó, người dùng cũng có thể dùng nút “+/-“ để tinh chỉnh chính xác tốc độ với bước chuyển 1 – 5 km/h. Sau đó, lái xe cần chọn thêm khoảng cách tối thiểu mong muốn giữa hai xe trước khi hệ thống ACC can thiệp giảm tốc độ của xe trong quá trình di chuyển.